The objective of this development is to make a fully autonomous floor cleaning machine for deployment at warm areas in nuclear facilities to save on man-rem expenditure.
The AUTONOMOUS ROBOT FOR CLEANING (AuRoClean) is designed to clean large halls. It consists of a scrubber brush at the front with arrangement to release cleaning water. At the rear side, there is a squeegee (wiper) that sucks the water on the floor through a vacuum pump. To begin the operation, operator shall specify the length and width of the hall to be cleaned and place the machine at the start position. With these inputs, AuRoClean can clean the entire hall on its own. Onboard mapping sensors and the intelligent software help to accomplish the task. It stops on encountering obstacles in its way and resumes operation as they moveaway. It can operate for 4 hours in a single charge.
A fully Autonomous and easy to use floor cleaning machine for deployment in warm areas at Nuclear facilities to save on man-rem expenditure. AuRoClean is your floor cleaning expert which can be easily configured to generate a cleaning plan. The system creates the map of the area on the fly and use its on-board navigation sensors to safely execute the cleaning plan. It supports both Manual and Autonomous mode for cleaning.



| Sr. No. | Specification | Value |
|---|---|---|
| 1 | Platform Configuration | Differential Drive |
| 2 | Weight | 180 kg |
| 3 | Speed | Variable, Up to Max. 600 mm/sec |
| 4 | Power source | Battery 24V, 130Ah Li-Ion |
| 5 | Scrubbing Width | 400 mm |
| 6 | Squeegee Width | 850 mm |
| 7 | Dirty Tank Capacity | 50 litres |
| 8 | Solution Tank Capacity | 50 litres |
| 9 | Localization | Laser based using Natural features |
| 10 | Collision Avoidance | Laser and Ultrasonic sensor array |
| 11 | Safety Sensors | Contact bumpers, Laser and Sonars |
| 12 | Environment | Indoor |
| 13 | Operation Modes | Manual and Auto |
The AUTONOMOUS ROBOT FOR CLEANING (AuRoClean) is designed to clean large hallsautonomously. It consists of a scrubber brush at the front that keeps rotating with arrangement to release cleaning water on the floor with the help of solenoid valve. The squeegee at the back, with the help of a Vacuum Suction pump, keeps sucking the dirty water into the recovery tank. To begin the operation, operator shall specify the length and width of the hall to be cleaned and place the machine at the start position. With these inputs, AuRoClean can clean the entire hall on its own. Onboard mapping sensors and the intelligent software help to accomplish the task. It stops on encountering obstacles in its way and resumes operation as they moveaway. It can operate for 4 hours in a single charge.
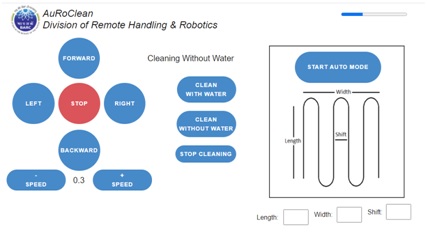
The objective of this development is to make a fully autonomous floor cleaning machine for deployment at warm areas in nuclear facilities to save on man-rem expenditure. The necessary software application and sensor card has been developed in-house. A user-friendly GUI is provided to the user for interaction and operation control.
AuRoClean is a high-tech battery-operated vehicle with high maneuverability and navigation support system
Technical Specifications
| Sr. No. | Specification | Value |
|---|---|---|
| 1 | Platform Configuration | Differential Drive |
| 2 | Weight | 180 kg |
| 3 | Speed | Variable, Up to Max. 600 mm/sec |
| 4 | Power source | Battery 24V, 130Ah Li-Ion |
| 5 | Scrubbing Width | 400 mm |
| 6 | Squeegee Width | 850 mm |
| 7 | Dirty Tank Capacity | 50 litres |
| 8 | Solution Tank Capacity | 50 litres |
| 9 | Localization | Laser based using Natural features |
| 10 | Collision Avoidance | Laser and Ultrasonic sensor array |
| 11 | Safety Sensors | Contact bumpers, Laser and Sonars |
| 12 | Environment | Indoor |
| 13 | Operation Modes | Manual and Auto |

